Autonomous Water Quality Monitoring Drone




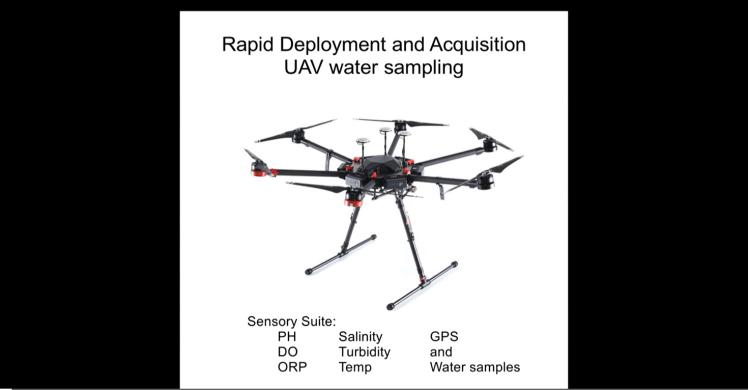
The Automated Sample Collection and Sensory Data Drone is a cutting-edge technology designed to revolutionize data collection in various industries. This advanced drone system combines autonomous flight capabilities with specialized sensors and collection mechanisms to gather samples and collect sensory data with precision and efficiency. The drone is equipped with state-of-the-art sensors and tools that enable it to autonomously navigate and perform sample collection tasks in challenging environments. Its ability to collect samples and capture sensory data in real-time offers tremendous potential for scientific research, environmental monitoring, and industrial applications, empowering users with valuable insights and facilitating data-driven decision-making.



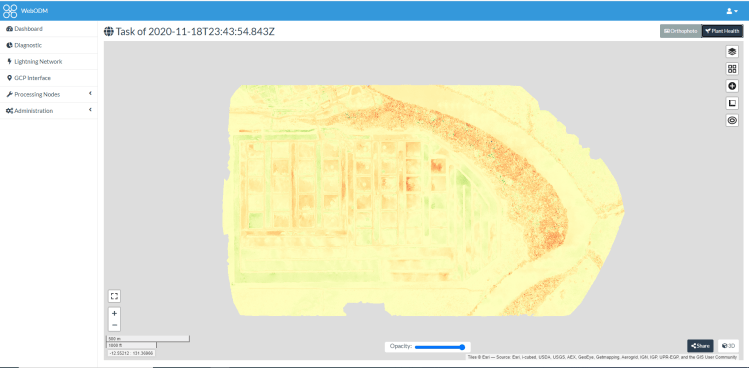
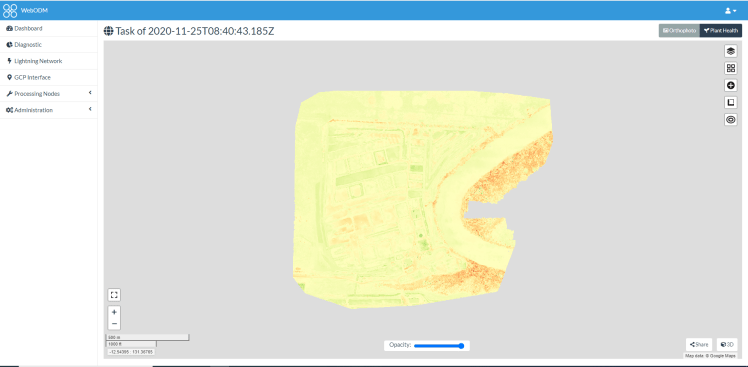
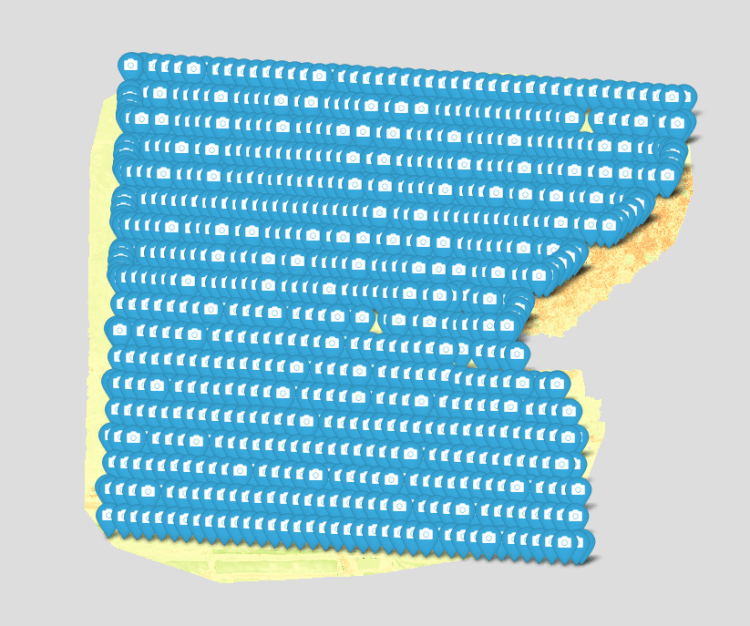
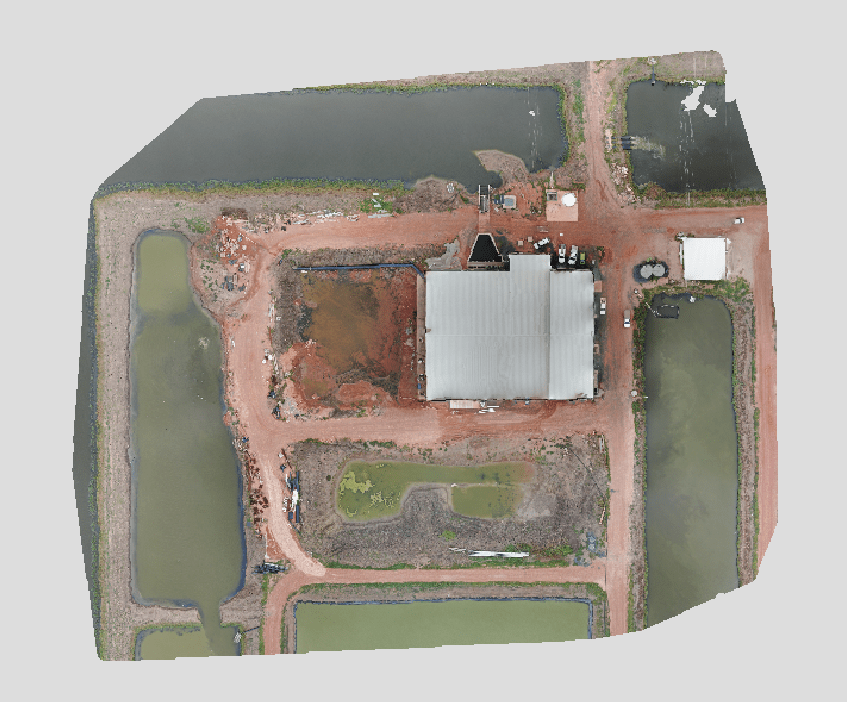
Site Mapping
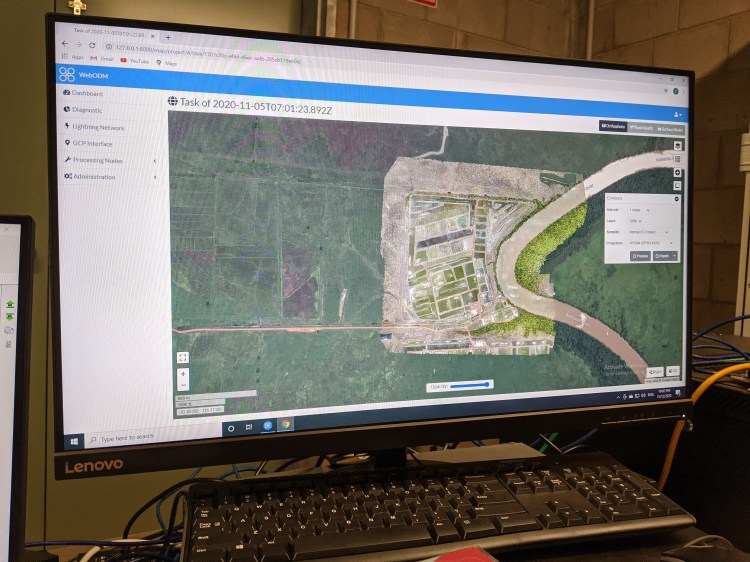

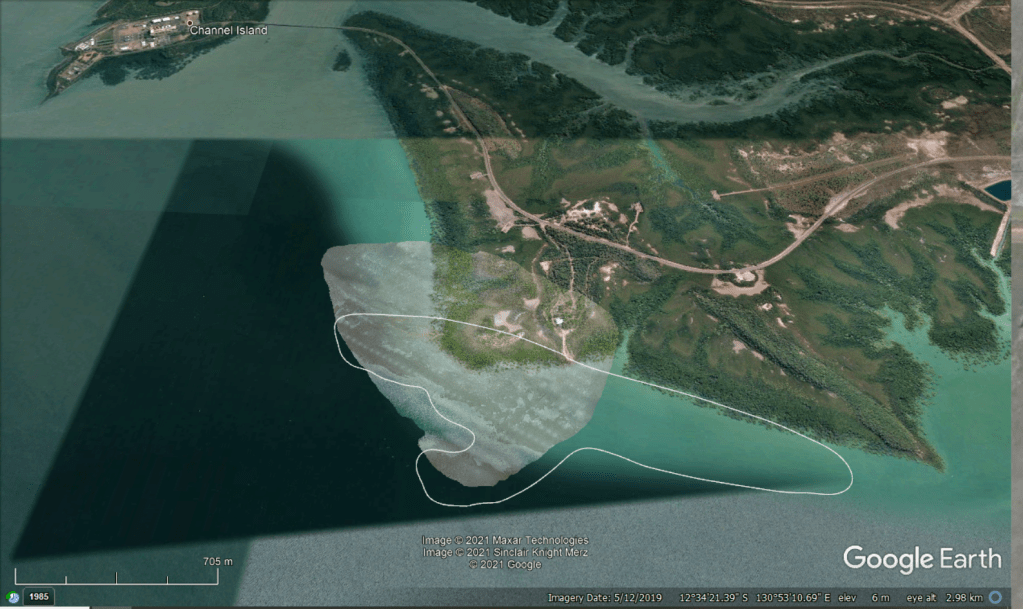
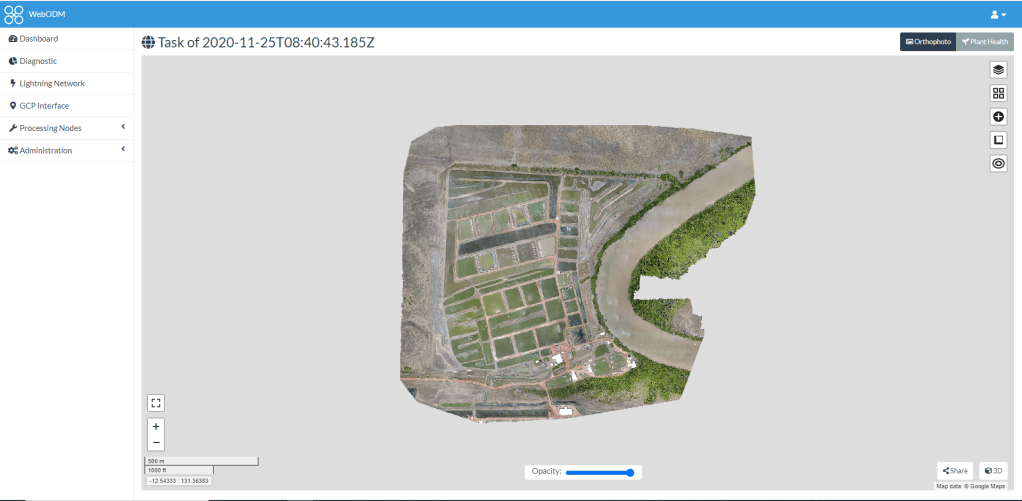

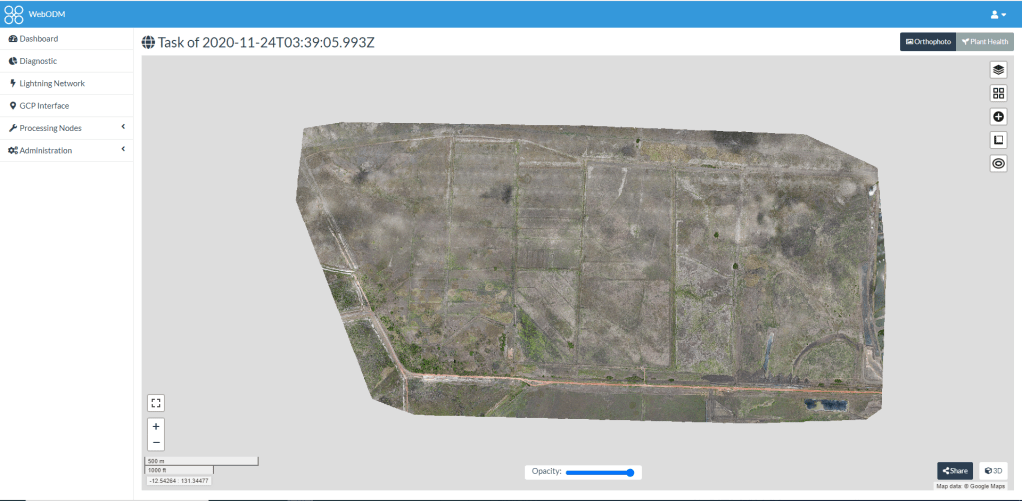
Digital Terrain Mapping (DTM)
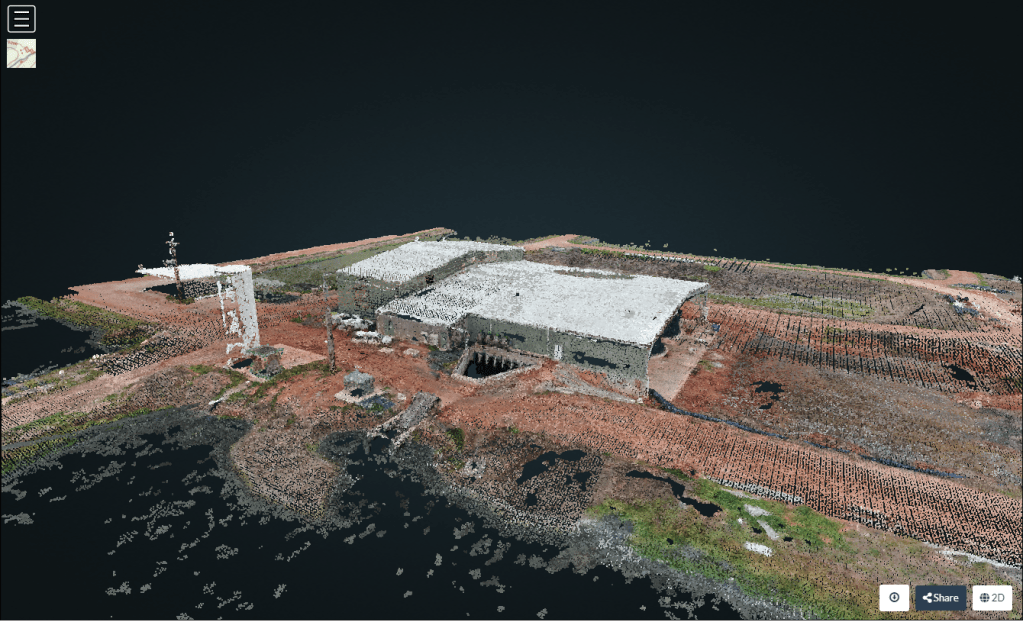
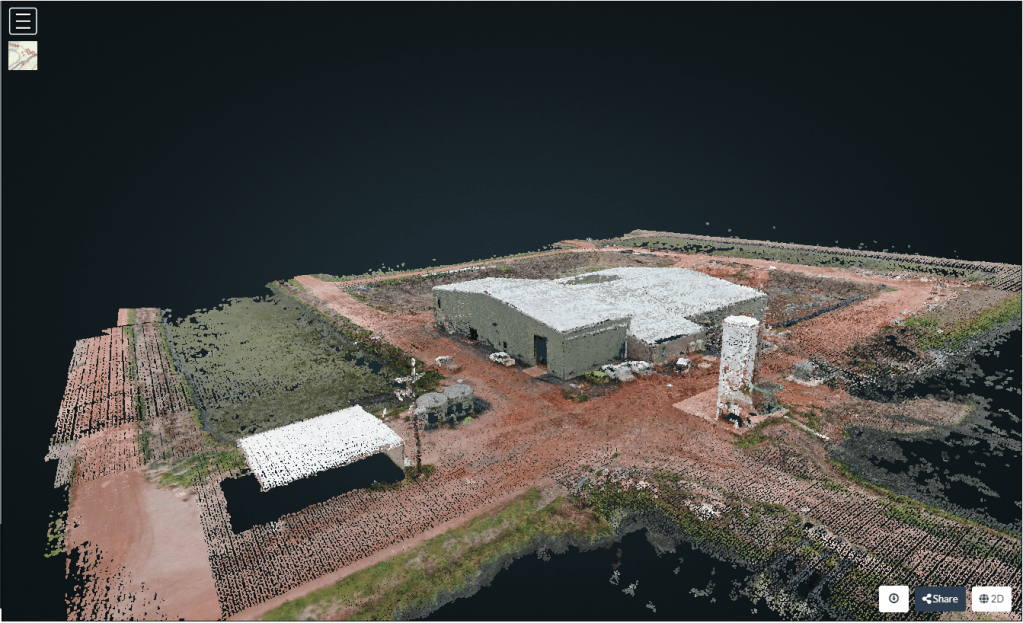
3D Mapping




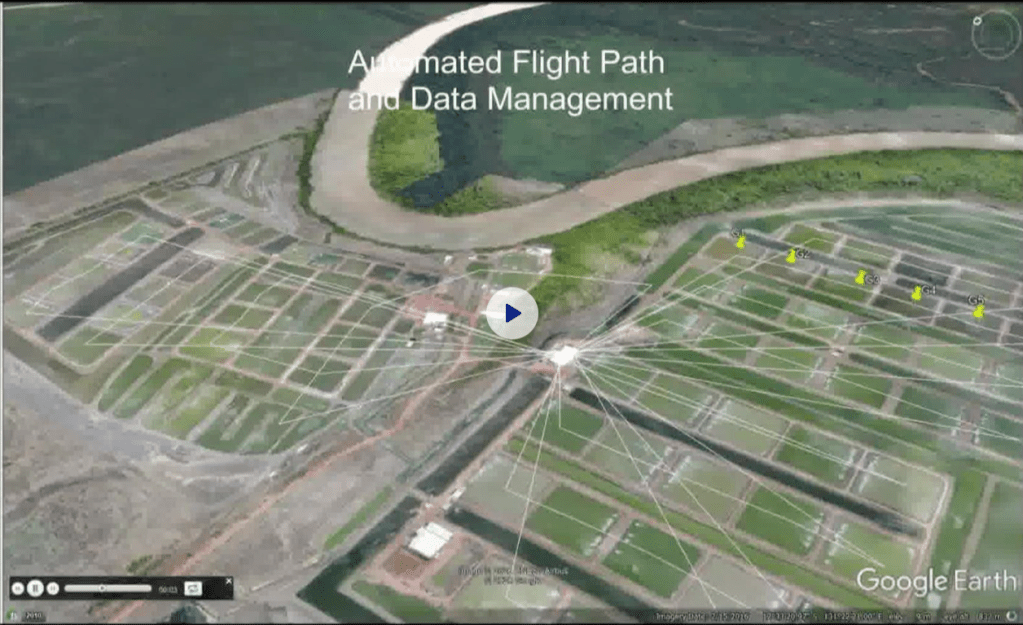
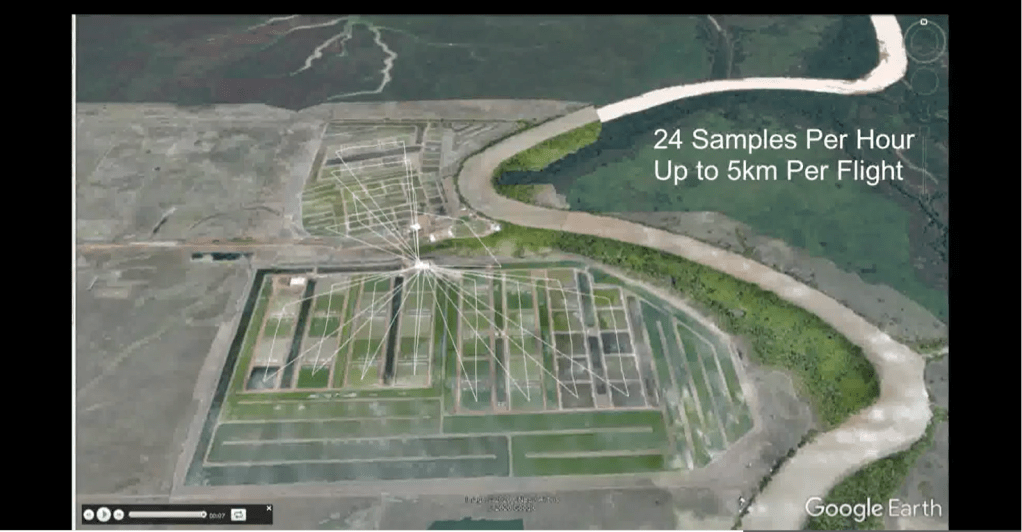
Routine Monitoring and Inspection



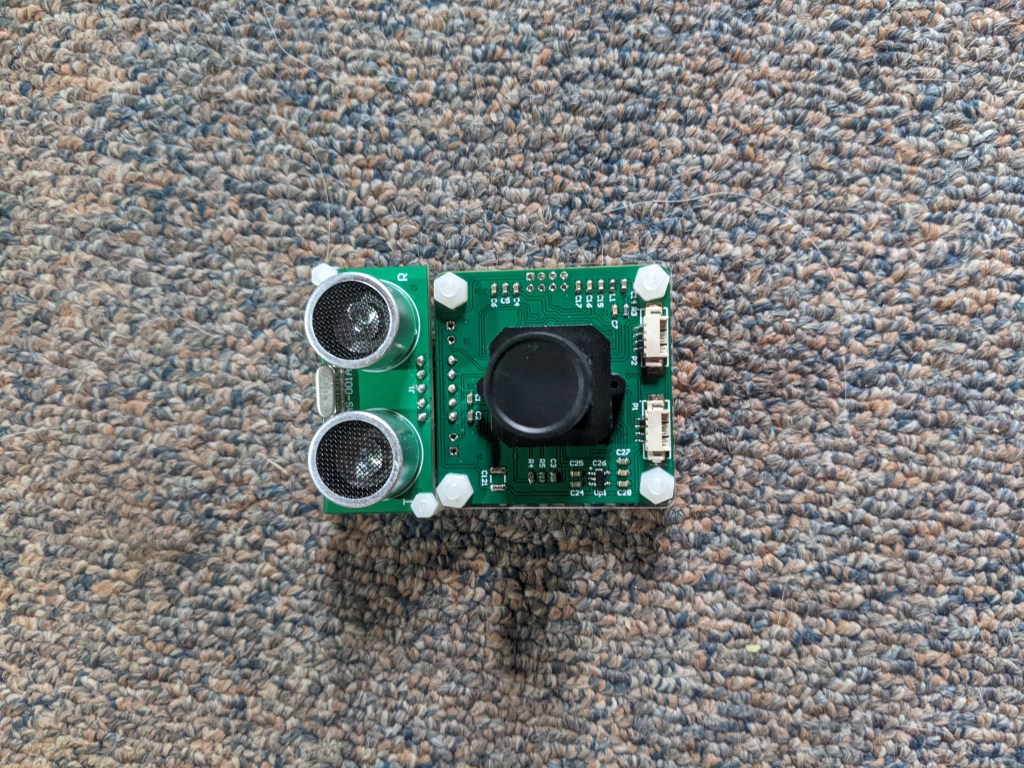
Building Custom Drone




Software In The Loop Testing

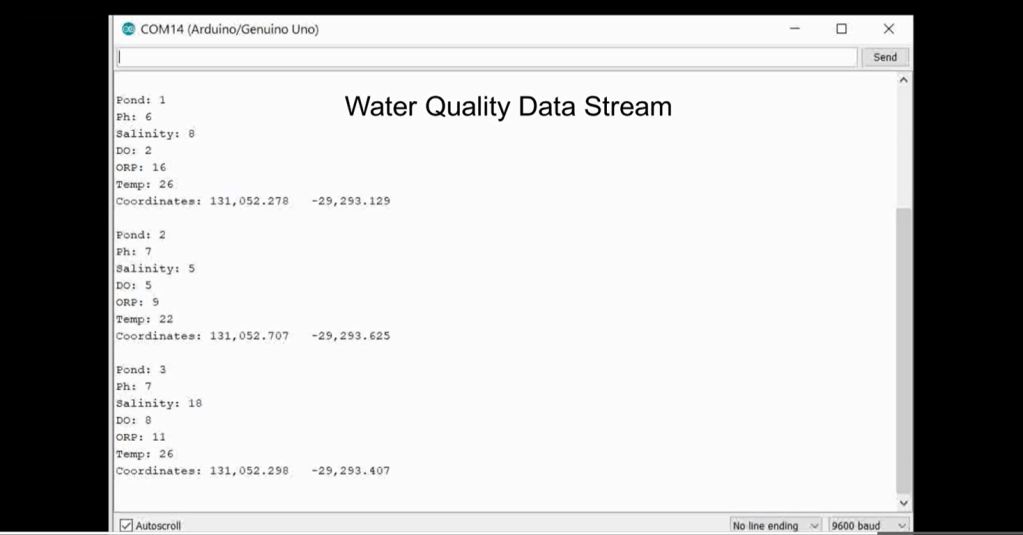
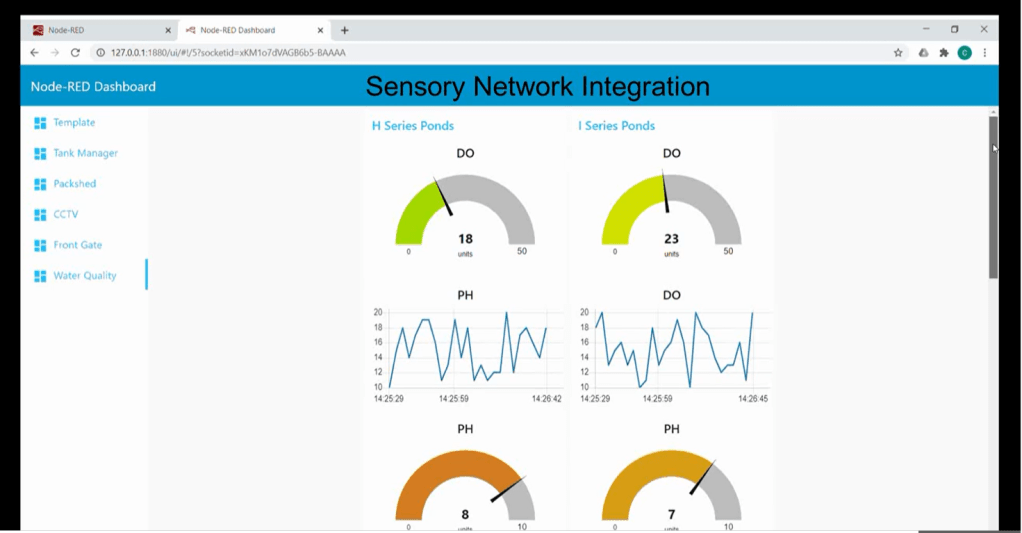
During the development of a custom drone solution for water quality monitoring, I utilized Software In The Loop (SITL) testing using ArduPilot, Python, and Mission Planner. This approach allowed me to simulate and evaluate the performance of the ArduPilot software specifically tailored for water quality monitoring drone applications. Here’s how I leveraged these tools:
ArduPilot:
- I utilized the ArduPilot open-source autopilot software suite to create a virtual simulation environment that emulated the behavior of the custom drone solution for water quality monitoring.
- This enabled me to test and validate the software’s capabilities, such as flight control, sensor integration, and autonomous navigation algorithms, in a controlled setting.
Python:
- Python served as the programming language for developing custom scripts and automation tools to interact with the ArduPilot software.
- With Python, I was able to create specific testing scenarios and analyze simulation results to ensure optimal performance and accuracy in water quality monitoring.
Mission Planner:
- I employed Mission Planner, a ground control station software, to interface with the simulated ArduPilot system.
- This provided me with a user-friendly interface to configure flight plans, monitor telemetry data, and analyze the drone’s behavior during water quality monitoring missions.
By utilizing the SITL testing approach with ArduPilot, Python, and Mission Planner, I conducted thorough testing and validation of the custom drone solution for water quality monitoring. This allowed me to fine-tune the software’s performance, optimize flight dynamics, and ensure reliable sensor integration for accurate water quality data collection. The combination of these tools provided an efficient and effective development process, enabling me to deliver a robust and tailored solution for water quality monitoring using a custom-built drone.
